IGRIS-C
Humanoid
At 154 cm and 56 kg, it ensures stable operation in tight spaces across labs, schools, offices, and factories. Equipped with AI control, human-like dual arms, an LED interface, and a mobile app, it is a versatile platform for research, testing, and education, designed to practically implement Physical AI.
IGRIS-C
Humanoid
At 154 cm and 56 kg, it ensures stable operation in tight spaces across labs, schools, offices, and factories. Equipped with AI control, human-like dual arms, an LED interface, and a mobile app, it is a versatile platform for research, testing, and education, designed to practically implement Physical AI.
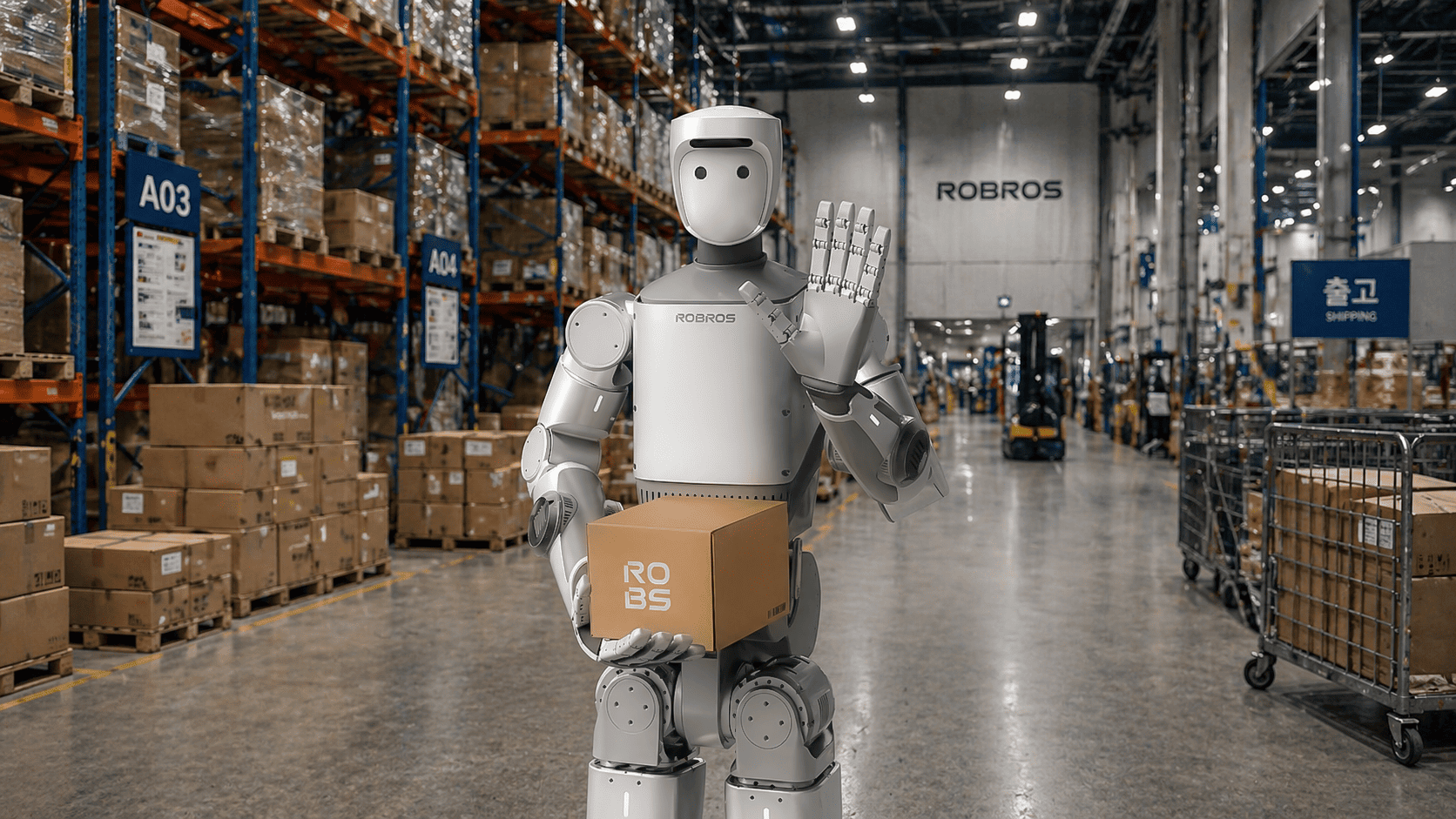
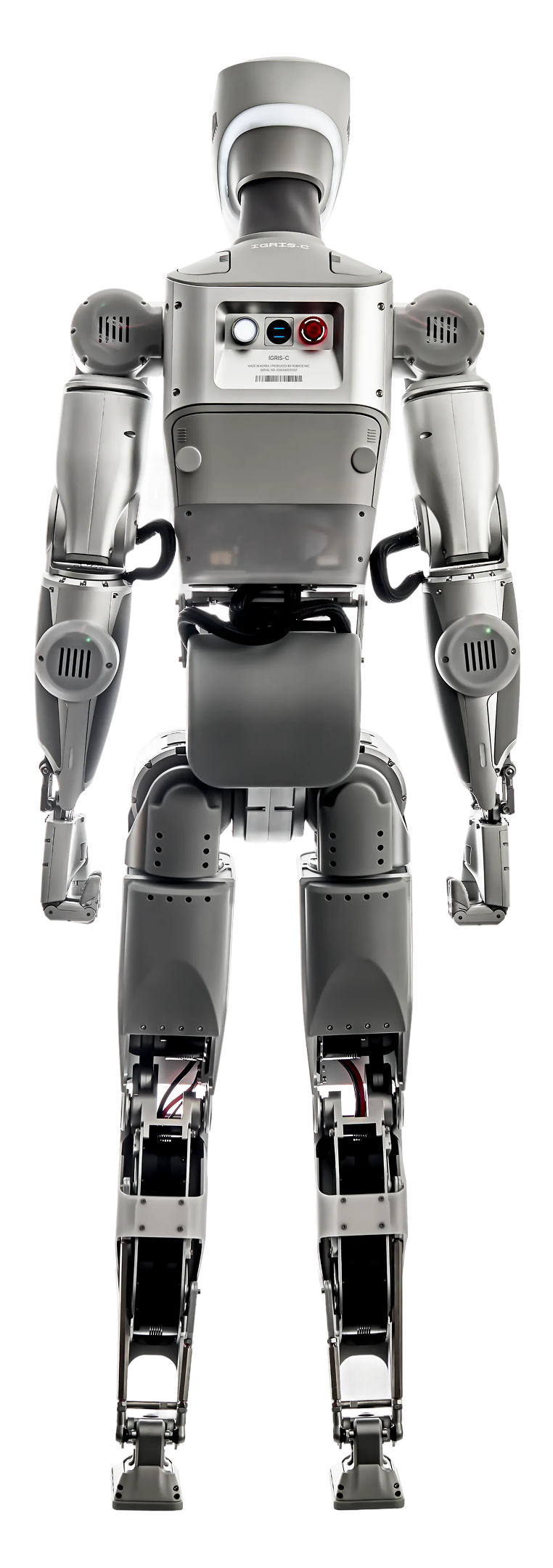
An AI humanoid robot
for indoor collaboration.
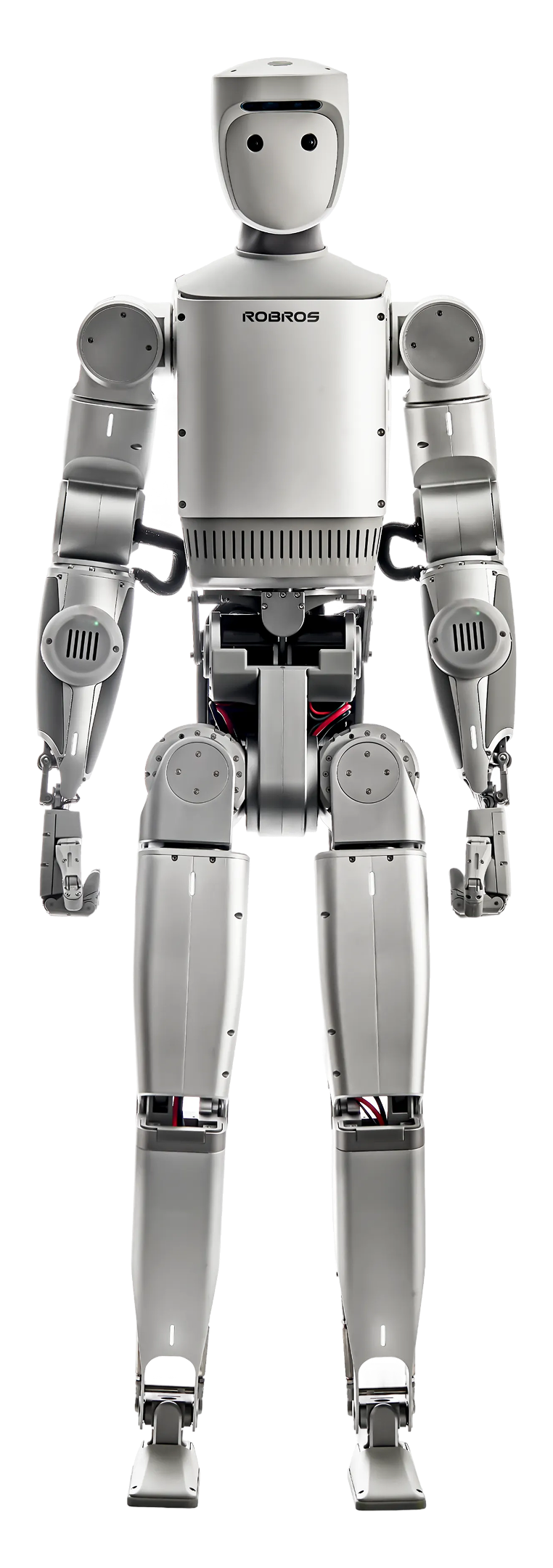
Size
Human-like Form Factor
At a compact 154 cm, it navigates tight spaces with natural poise, effortlessly adapting from labs to factories.
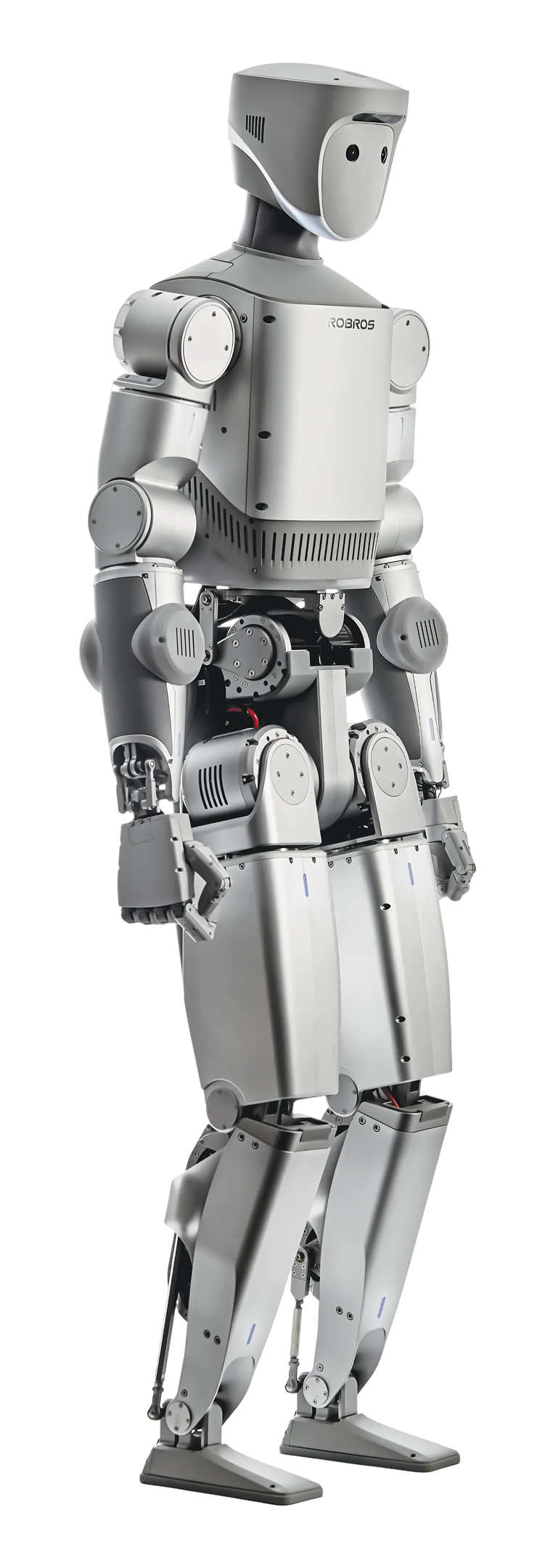
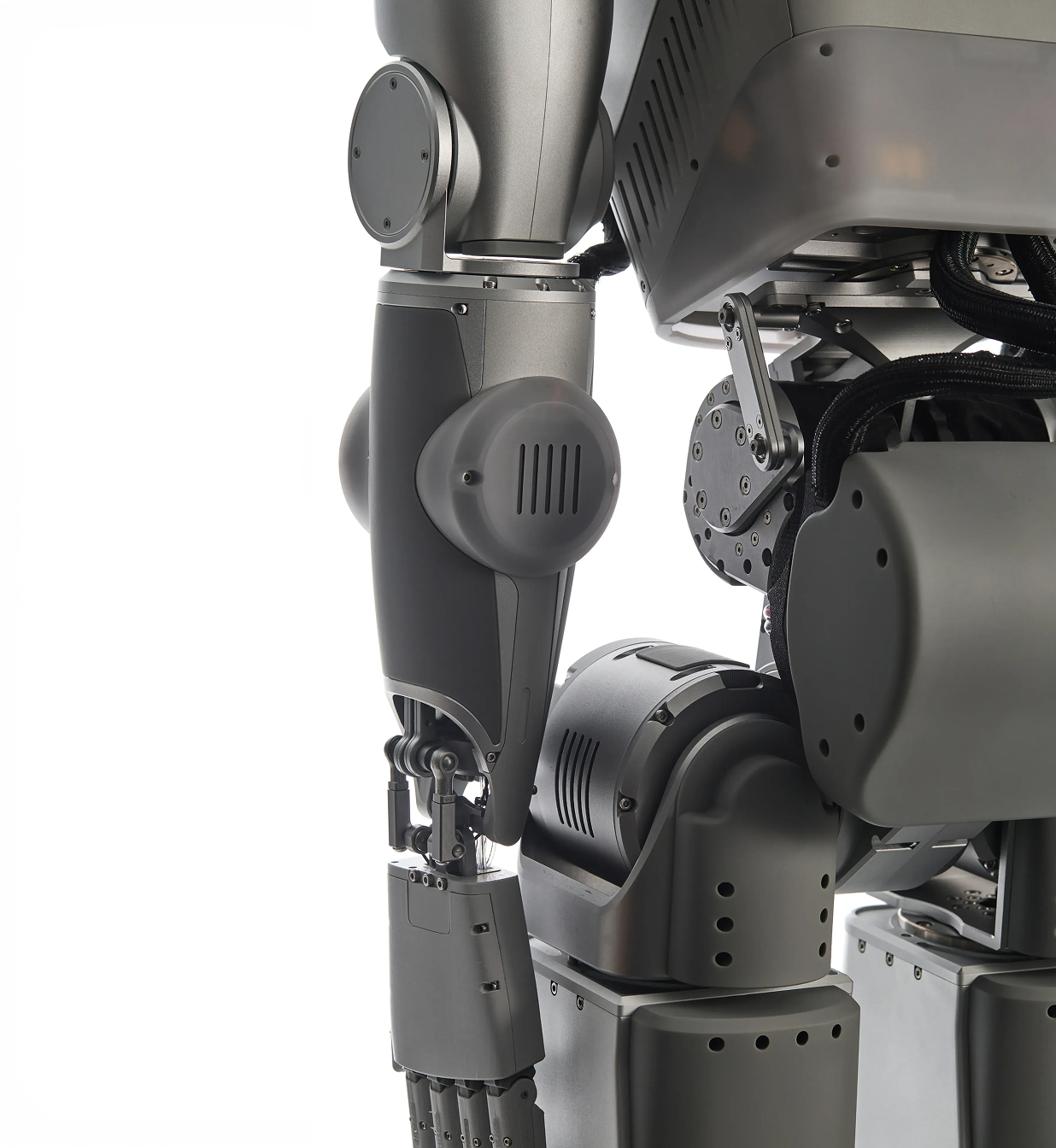
Mobility
All-Terrain Mobility
Navigates complex terrains like slopes and stairs with ease. Powered by robust joint control, it maintains unwavering balance to ensure uninterrupted workflows anywhere.

Safety
Compliant Control for Safe Contact
Close collaboration demands a delicate touch. By smoothly absorbing external impacts, IGRIS-C protects humans and maintains stability during unexpected contact.
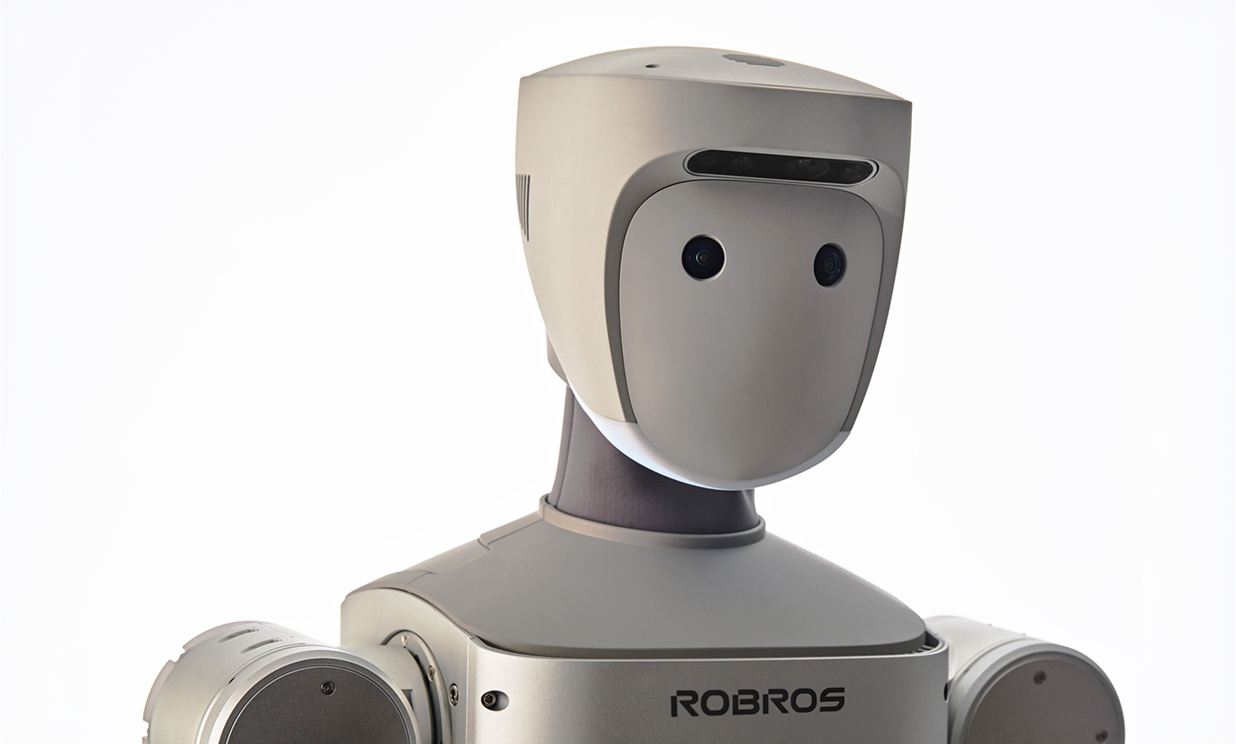
Interaction
Intuitive Communication
Visually communicates status for predictable teamwork. Driven by a situation awareness-oriented interface, this non-verbal approach fosters natural communication between humans and robots.

Size
Human-like Form Factor
At a compact 154 cm, it navigates tight spaces with natural poise, effortlessly adapting from labs to factories.
Safety
Compliant Control for Safe Contact
Close collaboration demands a delicate touch. By smoothly absorbing external impacts, IGRIS-C protects humans and maintains stability during unexpected contact.
Mobility
All-Terrain Mobility
Navigates complex terrains like slopes and stairs with ease. Powered by robust joint control, it maintains unwavering balance to ensure uninterrupted workflows anywhere.
Interaction
Intuitive Communication
Visually communicates status for predictable teamwork. Driven by a situation awareness-oriented interface, this non-verbal approach fosters natural communication between humans and robots.
Dimensions & Power
- Height154 cm
- Weight56 kg
- Battery Capacity17,000mAh 48V
- Recharge MethodDirect charge
- Charging Time2.5 h
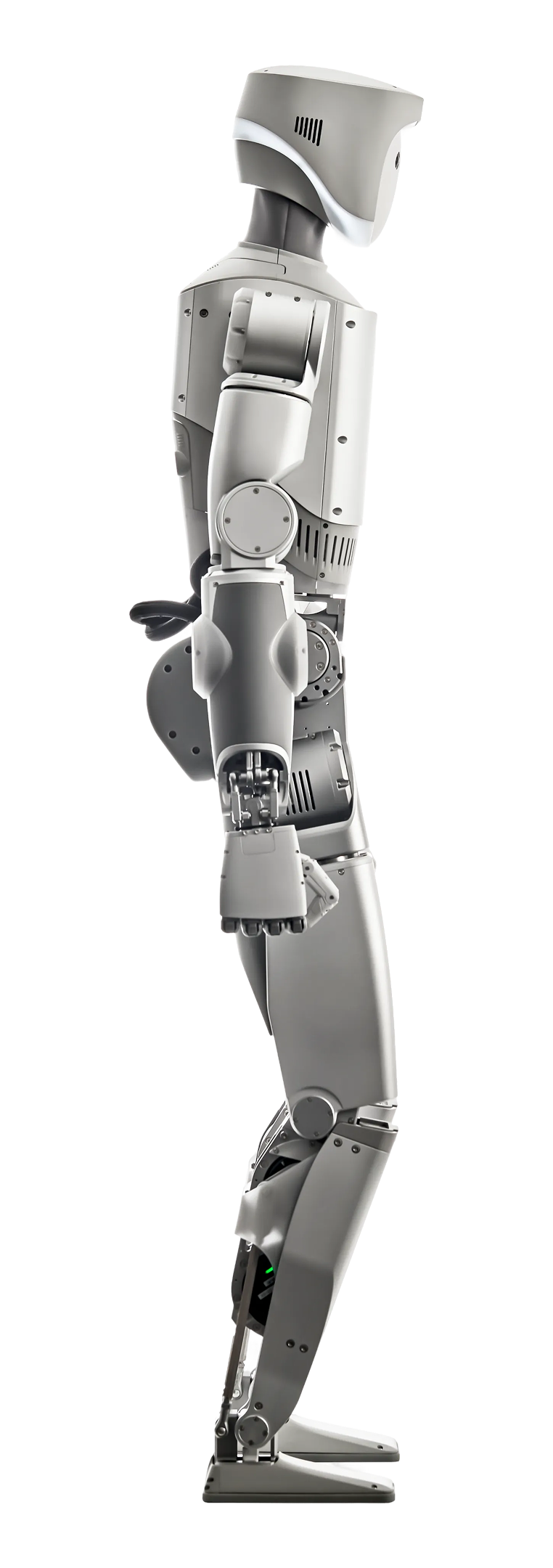
Degrees of Freedom
- Hands6 DoF x 2 Hands
- Arms7 DoF x 2 Arms
- Neck2 DoF
- Waist3 DoF
- Legs6 DoF x2 Legs
Intelligence
- OS / Middleware / APILinux / Cyclone DDS / C++ & Python APIs
- Learning CapabilitiesReinforcement & Imitation Learning
- ConnectivityWi-Fi (AP), BLE
- Software VersionContinuously Updated
Human-Robot Interaction
- ControlApp, Physical buttons
- FeedbackHead LED
- Active SafetyForce limiting, Collision detection
- Safe OperationEmergency stop, Collaborative mode
Perception
- VisionRGB Stereo, Depth Camera
- Sensors6-Axis IMU, Encoders
Deployment & Standards
- AvailabilitySouth Korea (Global inquiries welcomed)
- ComplianceIndustrial Standard Class A
Comes With

Master Arm
A teleoperation device that seamlessly maps human arm movements to the robot. It is essential for precise manipulation and collecting imitation learning data.

Remote Control App
A dedicated app for real-time monitoring of the robot's status. Intuitive joystick controls and preset functions ensure seamless operation.
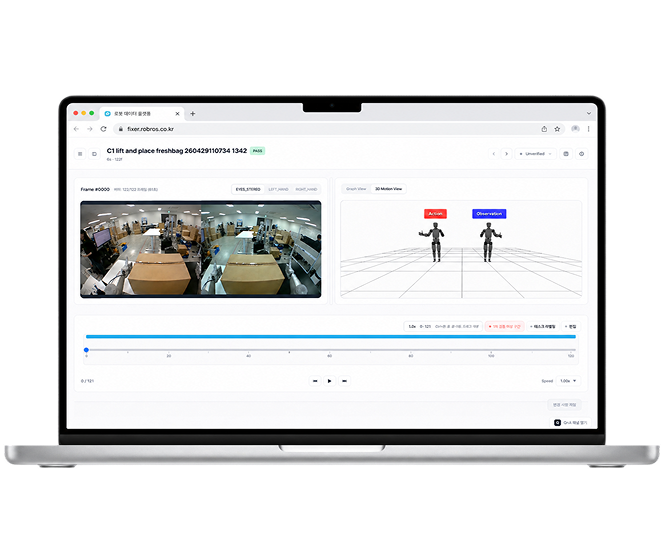
Data Platform
An in-house platform for episode inspection and data labeling. It builds the essential datasets required for advanced AI training.
Master Arm
A teleoperation device that seamlessly maps human arm movements to the robot. It is essential for precise manipulation and collecting imitation learning data.
Remote Control App
A dedicated app for real-time monitoring of the robot's status. Intuitive joystick controls and preset functions ensure seamless operation.
Data Platform
An in-house platform for episode inspection and data labeling. It builds the essential datasets required for advanced AI training.
An AI humanoid robot
for indoor collaboration.

Manufacturing
In environments where repetitive movement and transport occur, we think about how robots can contribute to the speed and flow of logistics.

Logistics
In environments with frequent movement of boxes and materials, we handle pick & place tasks considering space and traffic flow.

Construction
Moving through spaces after apartment completion, the robot plays a role in checking the status of each unit and public areas.

Shipbuilding
In industrial sites where high-temperature and heavy-weight work is routine, robots divide roles by moving through sections that are burdensome for humans.

R&D
In environments where experiments and verification are repeated, robots are used as subjects for testing and observation.
Manufacturing
In environments where repetitive movement and transport occur, we think about how robots can contribute to the speed and flow of logistics.
Logistics
In environments with frequent movement of boxes and materials, we handle pick & place tasks considering space and traffic flow.
Construction
Moving through spaces after apartment completion, the robot plays a role in checking the status of each unit and public areas.
Shipbuilding
In industrial sites where high-temperature and heavy-weight work is routine, robots divide roles by moving through sections that are burdensome for humans.
R&D
In environments where experiments and verification are repeated, robots are used as subjects for testing and observation.
Custom robotic hands
for future industrial sites.
The right tool for every task. ROBROS develops and tests diverse end-effectors tailored to specific physical demands. We validate the optimal robot-object interface, gathering data for real-world applications.
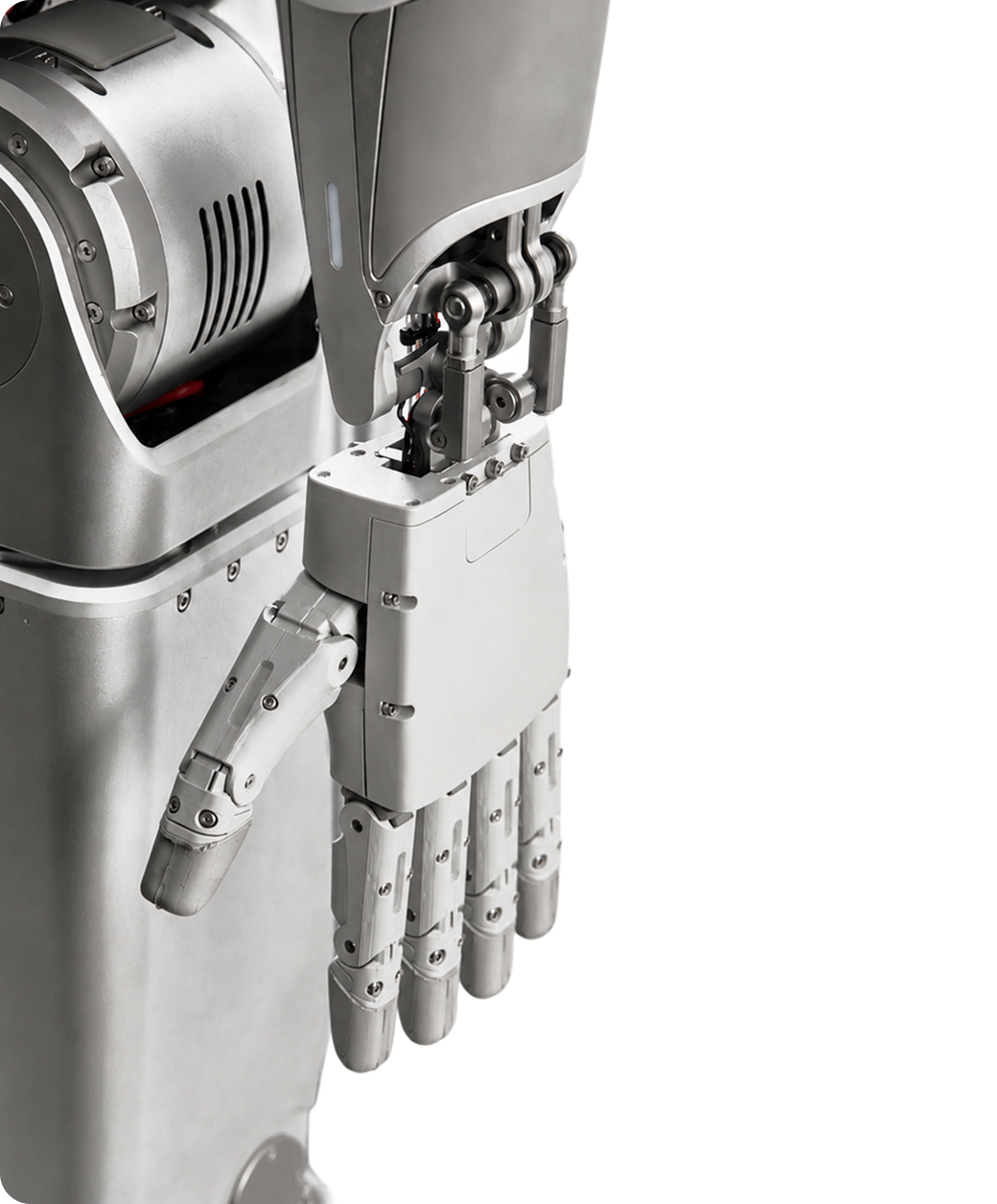
Designed for handling diverse objects.
Standard Hand
5-Finger Humanoid Structure
Enables versatile object manipulation with a human-like structure.
6 DoF Grasping
Delivers a practical grip via a 2-DoF thumb and 1-DoF coupled fingers.
Tendon-Driven Mechanism
Features a lightweight and space-optimized internal design.
Adaptive Grasping Mechanism
Securely wraps around objects of various shapes and sizes.